 This is the modified steering. The orientation of the servo is unorthodox. I had trouble making sure that I had enough room for the antenna, receiver and switch after the steering had been rotated 180 degrees. Rather than place the servo laying flat on the chassis behind the steering suspension, I stood up the servo and placed it between the steering mounts to create more room for the electronics all the way in the rear of the car.
This is the modified steering. The orientation of the servo is unorthodox. I had trouble making sure that I had enough room for the antenna, receiver and switch after the steering had been rotated 180 degrees. Rather than place the servo laying flat on the chassis behind the steering suspension, I stood up the servo and placed it between the steering mounts to create more room for the electronics all the way in the rear of the car.  This is the front end of the car. This is where the pitot tube ports are located. A pitot tube is used on full size aircraft to measure airspeed. The dynamic pressure port is on the bottom. This port measure the forward airspeed as the car is running. The tube on top is for the static port. This measures the ambient pressure. The difference in the dynamic pressure and static pressure is speed. More info on pitot tubes can be found here.
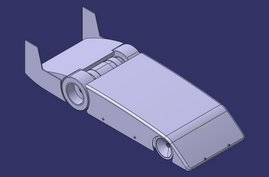
This is the front end of the car. This is where the pitot tube ports are located. A pitot tube is used on full size aircraft to measure airspeed. The dynamic pressure port is on the bottom. This port measure the forward airspeed as the car is running. The tube on top is for the static port. This measures the ambient pressure. The difference in the dynamic pressure and static pressure is speed. More info on pitot tubes can be found here.

 This is where the air travels down the brass tubes to the silicone tubes to the speed sensor. This is where the dynamic and static pressures are measured.
This is where the air travels down the brass tubes to the silicone tubes to the speed sensor. This is where the dynamic and static pressures are measured. This is data from a short test run I did on the street in front of my house. There is a lot of noise in the data from 0-8 seconds. The car wasn't even running on the ground between 1-8 seconds. After that, you can see from the spikes in the speed data that I made 4 passes. My fastest pass was about 18 mph.
This is data from a short test run I did on the street in front of my house. There is a lot of noise in the data from 0-8 seconds. The car wasn't even running on the ground between 1-8 seconds. After that, you can see from the spikes in the speed data that I made 4 passes. My fastest pass was about 18 mph. Currently I am working on getting new wheels put together and making a wing for some front end downforce. I will post more about these parts soon.



No comments:
Post a Comment